DENSO - RC8A IT-ROB-DEN-2018-00001
Vous avez d'autres questions ? N'hésitez pas à nous contacter.

Borja Garcia
+34 679 019 350
b.garcia@gindumac.com
- GINDUMAC
- Produits
- Équipement d'automatisation
- ➤ DENSO RC8A - 2018 - Robot à vendre | gindumac.com
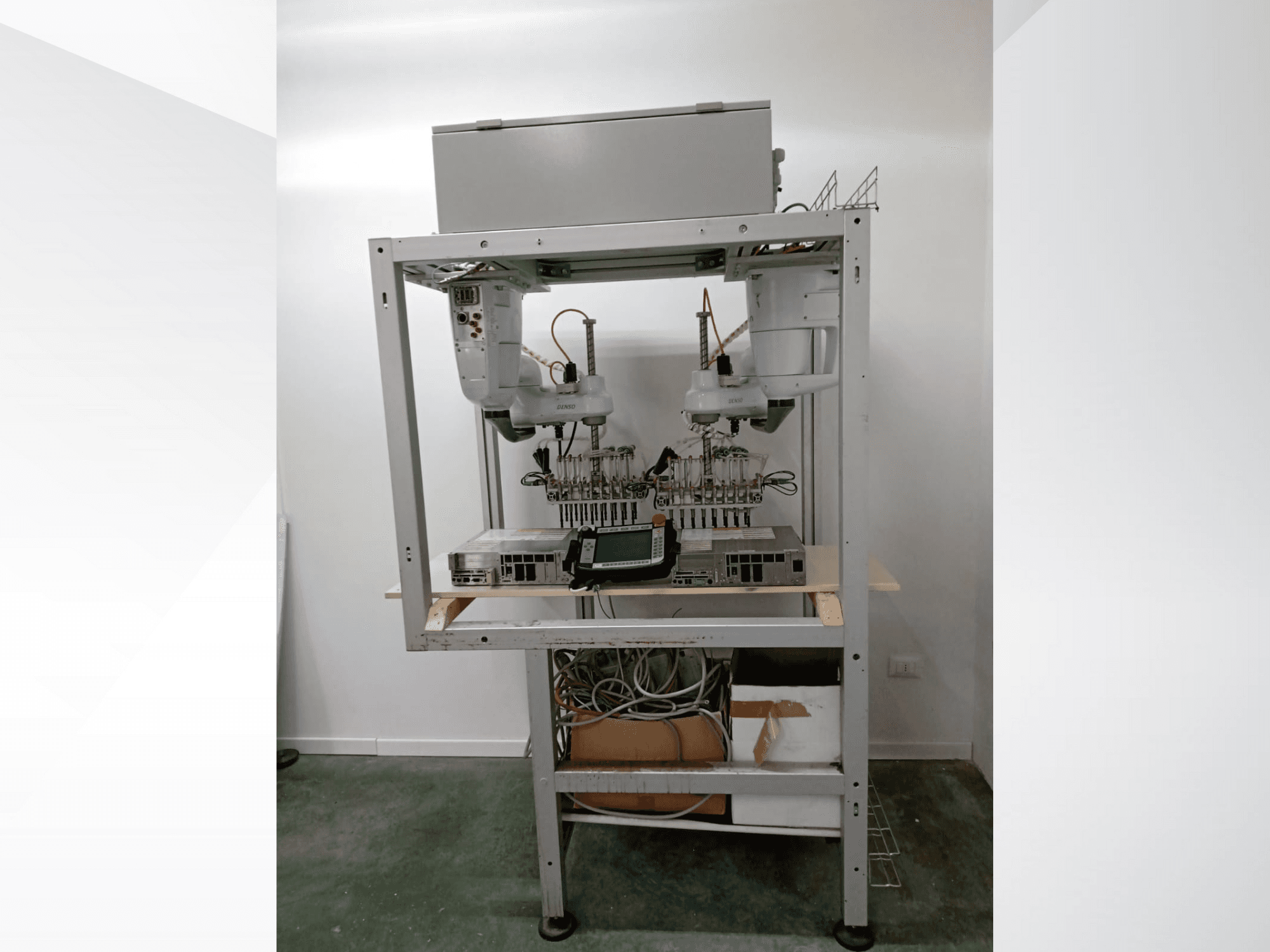
Cette DENSO RC8A a été fabriquée en 2018. Elle comporte une cellule robotique avec deux robots SCARA, chacun capable d'une portée maximale de 550 mm et d'une course de 320 mm sur l'axe Z. Le système comprend un contrôleur RC8A, un logiciel de programmation hors ligne et des fonctions d'autodiagnostic. Idéal pour les applications nécessitant une manipulation robotique à grande vitesse. Contactez-nous pour plus d'informations sur cette machine.
Vue d'ensemble
- marque: DENSO
- année: 2018
- MODÈLE: RC8A
- type d'application: Robotique
- Emplacement: Italie
- type de machine: Bras de robot
Informations supplémentaires
Motion & Control :
Système de contrôle point à point
Mouvements linéaires et circulaires en 3 dimensions
Capacité de mémoire :
Mémoire des variables : 1,75 Mo (environ 65 000 points)
Mémoire des programmes : 400 MO
Jusqu'à 256 programmes
5000 instructions par programme
Signaux d'E/S :
Entrées :
8 entrées utilisateur au poignet du robot (Hand I/O)
8 entrées utilisateur au niveau du contrôleur (Mini I/O)
8 entrées système
Sorties :
8 sorties utilisateur au poignet du robot (E/S manuelle)
7 sorties utilisateur au niveau du contrôleur (Mini I/O)
8 sorties système
Interfaces de communication :
1 × RS-232C
Ethernet Gigabit
2 × USB
Caractéristiques supplémentaires :
Fonctions d'autodiagnostic
Conditions de fonctionnement :
Température : 0-40 °C
Humidité : ≤ 90% RH
Dimensions et poids du contrôleur :
RC8A standard : 357 × 320 × 94 mm
RC8A avec mouvement de sécurité : 411 × 320 × 94 mm
Volume : 12,4 litres
Poids : 12 kg
Câbles :
Câble d'alimentation : 5 m
Câble E/S : 8 m (en option)
Pendentif d'apprentissage :
Quantité : 1 unité (pour les deux robots)
Longueur du câble : 4 m (8 m / 12 m en option)
Écran :
Écran tactile TFT LCD de 7,5 pouces
Résolution : 640 × 480 pixels
Alimentation électrique : 24 V
Classe de protection : IP65 (résistant à la poussière et aux éclaboussures)
Dimensions : 290 × 198 × 80 mm 290 × 198 × 80 mm
Poids : environ 1 kg
Fonctions :
Création et édition de programmes
Configuration des paramètres
Jogging du robot et contrôle des mouvements
Démarrage du programme
Mode d'apprentissage et de vérification
Gestion des E/S
Configuration de la communication
Affichage des erreurs
Robots
Quantité : 2 unités
Type : SCARA
Caractéristiques mécaniques :
Portée maximale : 550 mm
Course de l'axe Z : 320 mm
Répétabilité (J1 + J2) : ±0,012 mm
Répétabilité (axe Z) : ±0,01 mm
Répétabilité (axe T) : ±0.004°
Capacité de charge utile (poignet) : 8 kg
Vitesse
Vitesse maximale du composite : 8780 mm/sec
Vitesse de l'axe Z : 2760 mm/sec
Vitesse de l'axe T : 220°/sec
Connexions du bras du robot
Connexions pneumatiques :
4 tubes d'air, Ø 6 mm
Signaux électriques :
24 signaux via un connecteur
Caractéristiques du robot
Logiciel de programmation hors ligne
Encodeurs absolus
Servomoteurs CA étanches, sans balais et sans entretien
Alimentation électrique : Monophasé ou triphasé 230 V
Équipement supplémentaire
2 dispositifs de préhension avec capteurs pour la détection de la quantité prélevée
1 armoire de commande électrique reliant l'ensemble du système
Historique de la machine
Description fonctionnelle : La cellule robotisée a été conçue à l'origine pour alimenter une machine d'emballage de couverts. Le système prélevait des fourchettes empilées dans des caisses dédiées et les transférait sur un convoyeur d'emballage à une vitesse de chargement de 100 pièces par minute. Alors que les deux robots SCARA fonctionnaient correctement, le système d'échange des caisses (caisses vides ou pleines) n'était pas conçu de manière optimale. C'est pourquoi la cellule robotique a finalement été mise hors service. Une courte vidéo du robot en fonctionnement est disponible.
*Il peut y avoir des différences entre les données indiquées et les valeurs réelles, ce qui doit être confirmé par le représentant des ventes.
Borja Garcia
Conditions de paiement
Paiement à l'avance
Financement d'actifs